
Промышленные роботы
Роботы последнего поколения подвижны и эффективны. Они упаковывают товары, наклеивают этикетки, сортируют товары на складе. Некоторые могут обрабатывать деревянные и металлические изделия.
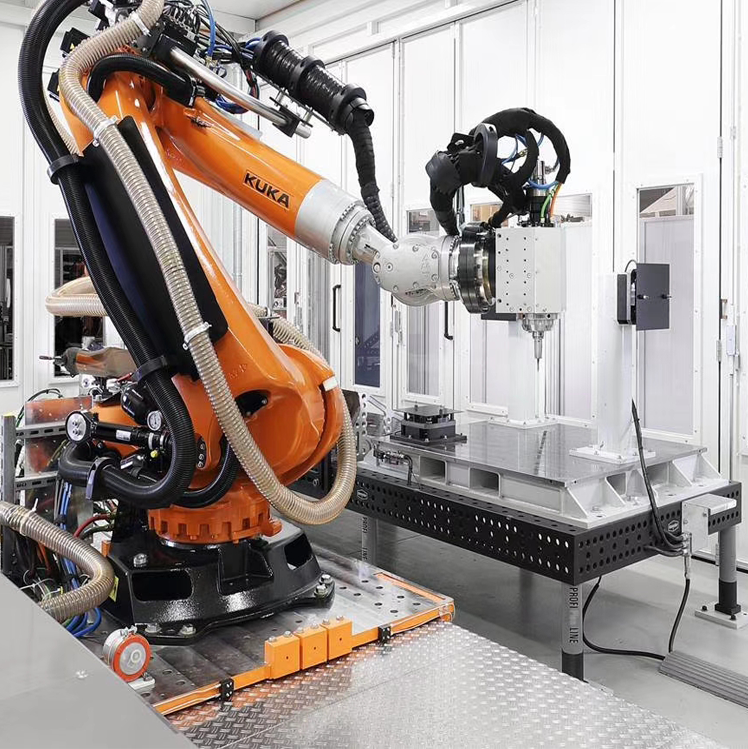
KUKA KR QUANTEC PA
![]()
Образцовый укладчик, похожий на большую механическую руку. Он работает при низкой температуре и поэтому востребован в пищевой промышленности, где нужно хранить грузы в морозильной камере.
Машине не нужен подогрев или защита от холода. Это обеспечивает минимальный износ оборудования. Kuka также занимается упаковкой товаров, выборочным комплектованием и другими операциями манипулирования.
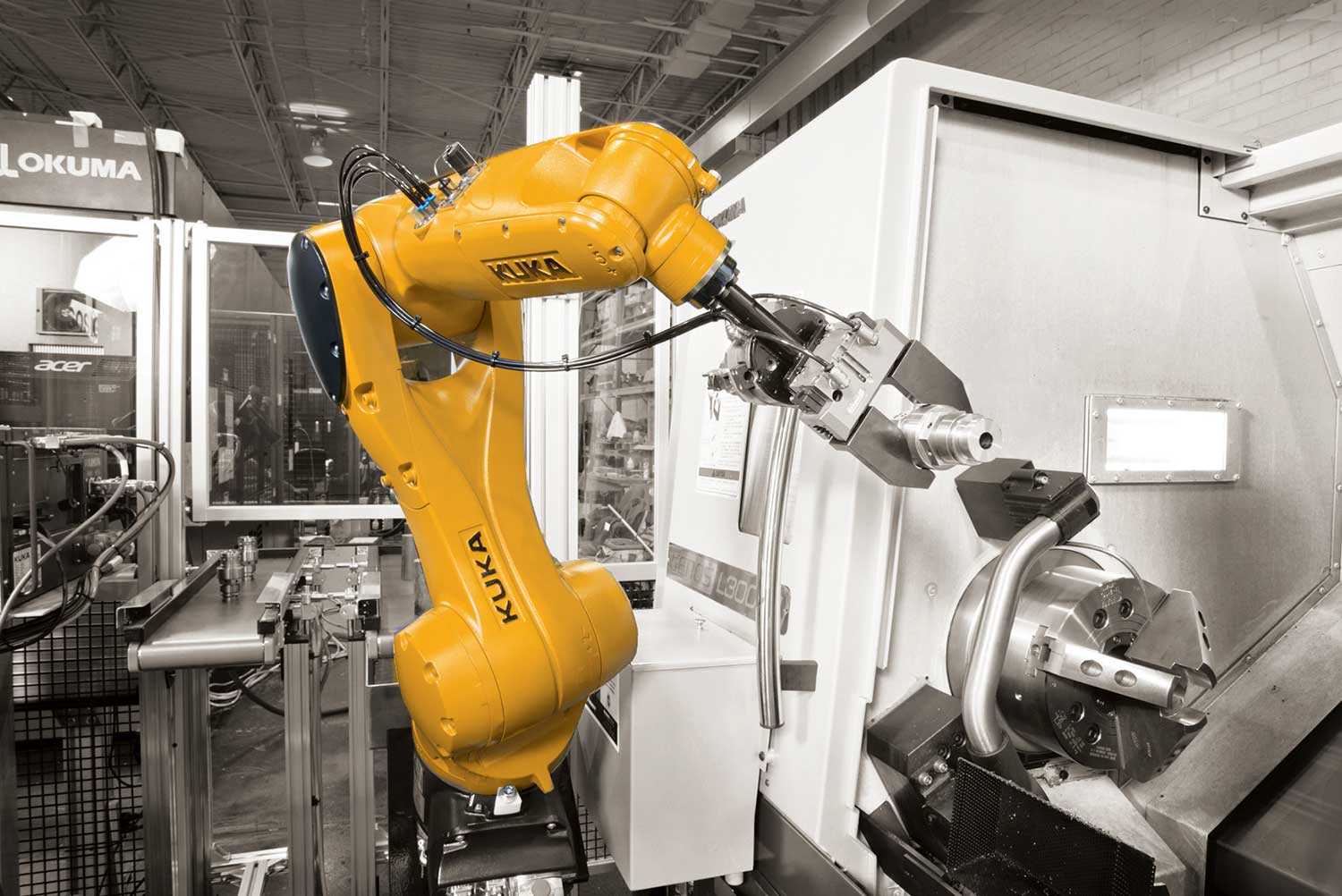
FANUC M-2000iА
![]()
Японские роботы этой серии захватывают и перевозят тяжести. Они исполняют роль погрузчика, причём без участия оператора. FANUC – прочный шестиосный аппарат с самой большой грузоподъёмностью в мире (до 1,2 тонны).
Работа ведётся от 0 до +45 градусов, а длинная механическая рука может дотянуться к объекту так же, как это делает подъёмный кран.
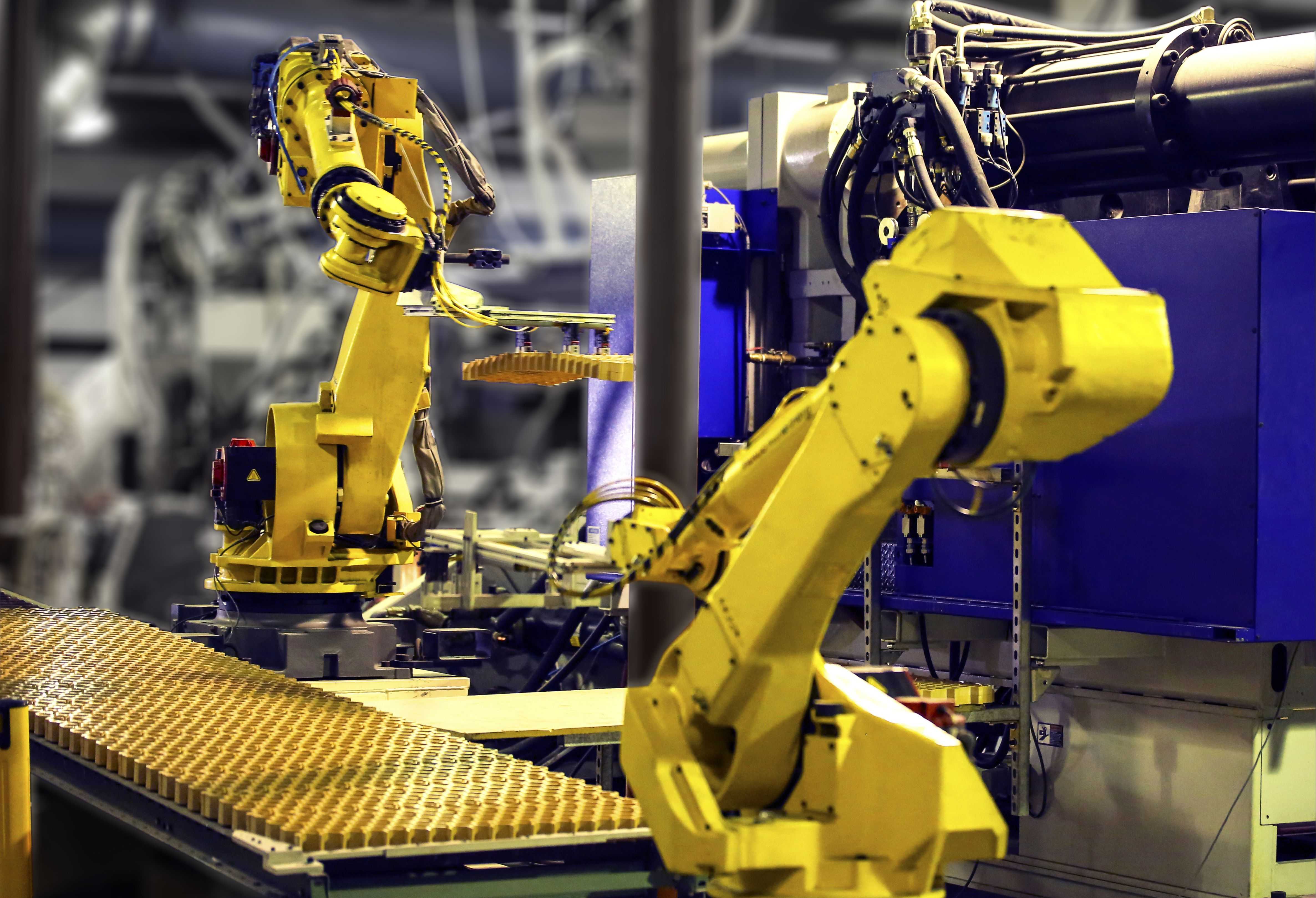
Universal Robots
![]()
Это серия универсальных манипуляторов. Модель UR10 становится «третьей рукой» человека и помогает проводить литьевые или сварочные работы быстрее.
Другие версии Universal Robots завинчивают детали, подготавливают материалы для 3D-печати, складируют товары.
Роботы оставят людей без работы?
В ближайшем будущем роботы принципиально не изменят жизнь человека, но если посмотреть на вопрос в далекой перспективе, то тенденции на общую роботизацию очевидны. Вот направления, которые в ближайшие годы повлияют сильнее всего на развитие робототехники в мире и в России в том числе.
- Необходимы новые технологии в области энергообеспечения роботов, совершенствование современных аккумуляторов и создание новых элементов питания. Если будет реализована идея дистанционной подзарядки робота от источников энергии, встроенных в пол или стены, то это тоже значительно способствует развитию отрасли.
- Сейчас активно развиваются технологии, позволяющие роботам взаимодействовать не только с людьми, но и друг с другом, — например, системы управления беспилотным трафиком. Транспортные роботы должны связываться друг с другом, чтобы избежать аварий и несчастных случаев.
![]() Free Creative Stuff / Pexels
Free Creative Stuff / Pexels
Важное направление — навигация в экстремальных условиях. Роботы должны четко понимать, куда они двигаются при низкой или нулевой видимости, в том числе в тех местах, куда человеку попасть не получится — на морском дне или в горах
Также у робота должен быть алгоритм действий на тот случай, если он останется совсем без связи — например, если спутник выйдет из строя. Полностью автономные системы навигации для беспилотных устройств сейчас разрабатывают как в России, так и за рубежом.
- В будущем больше внимания будут уделять не жесткому программированию, а обучению роботов алгоритмическим процедурам. Машина сможет сама получать новые навыки и обрабатывать их с помощью искусственного интеллекта. С развитием ИИ появится больше действительно «умных» роботов. Взаимодействие человека с ними станет развиваться по нескольким основным направлениям:
- роботы, повторяющие возможности человека (протезы, экзоскелеты);
- роботы, расширяющие возможности человека;
- роботы, дистанционно управляемые человеком (для использования в труднодоступных местах);
- роботы, которые общаются с человеком голосом (чат-боты и голосовые помощники).
Владимир Смирнов из ДГТУ также считает, что роботы не оставят людей без работы:
Специальный проект Фонда «Вольное дело» Дерипаски и Журнала «Нож»
Возврат инвестиций и прибыль
Окупаемость проекта роботизации производства составляет, обычно, от одного до трех лет. После возврата инвестиций наступает период, когда робот приносит чистую прибыль. Чтобы точнее рассчитать сроки окупаемости, необходимо учесть ряд факторов: цену роботизированного комплекса, условия эксплуатации, прогнозируемую прибыль проекта.
Робот выполняет работу 2-6 человек, работая 24 часа в сутки и 7 дней в неделю, 52 недели в году. Цена оборудования сопоставима с расходами на содержание штата в течение 1-3 лет. В затраты входят: заработная плата, налоги, оплата отпусков, больничных листов, страховые выплаты, средства индивидуальной защиты, рабочая одежда.
Расчет
Мы предлагаем обобщенный расчет, который не может быть применим на 100% ко всем предприятиям разных видов деятельности, однако, он наглядно демонстрирует возможности экономии при переходе с ручного труда на автоматизированный.
В данном случае мы опирались на данные, связанные с внедрением кобота Hanwha .
Один год
В лизинг
На содержание приобретенного в лизинг робота в год требуется 1,020 млн рублей, а расходы на содержание штата персонала, работающего в 2 или 3 смены — 1,694 млн и 2,542 млн. Если добавить стоимость подбора сотрудников — 1,925 и 2,887 млн.
Выгода от применения робота в первый год:
работа в 2 смены — 904 603,6 р;
работа в 3 смены — 1 867 249,36 р.
Во второй и третий год:
2 смены — 816 938,61 р.;
3 смены — 1 664 384,64 р.
После трех лет, когда робот полностью окупился, экономия равна стоимости содержания сотрудников, вместо которых он работает.
Сразу
При прямой покупке, без лизинга, уже в первый год использования (при сравнении с рабочими для работы в три смены), робот покрывает свою стоимость и выходит в плюс. Считаем: 2887 тыс. рублей (где 2542 тыс. на ежемесячные расходы + (115 х 3) закрытие вакансий) минус 2159 тыс. (стоимость робота) = 728 тыс. разницы, то есть — выгоды от применения робота.
Ответы на вопросы:
Что такое 115 тыс. руб.: стоимость услуг агентства по подбору персонала составляет 20% от суммарного дохода за год по вакансии, мы отталкивались от рыночной заработной платы (48 000 руб.). Далее прибавили эту сумму по одному разу на найм каждого рабочего в первый год: работа в 2 смены — 2 человека, в 3 смены — 3 человека.
Если ваша компания укомплектована подходящими сотрудниками, можно не учитывать эту сумму в расчетах, а если возникнет необходимость замены сотрудника — прибавляйте её.
Откуда берутся 16 тыс.руб./месяц: Это обязательная часть выплат на каждого сотрудника в ПФР.





Что значит ПНР от 0 рублей: мы бесплатно устанавливаем и запускаем оборудование на площадках наших покупателей. Исключение составляют случаи пуско-наладки в дальних регионах, или необходимость оказания допуслуг, например — подготовка рабочей зоны или систем машинного зрения. Каждый проект рассчитывается индивидуально.
Три года
Три первых года трехсменной работы приобретенного в лизинг робота приносят около 5 млн руб выгоды, по сравнению с ручным трудом. При покупке за счет собственных средств — больше 5 млн руб.
После периода окупаемости затраты на оборудование равны стоимости электроэнергии и технического обслуживания. Таким образом, ежегодная экономия составляет примерно 2,5 млн руб.
Наши проекты автоматизации производства всегда основаны на расчете окупаемости вложений. Средний срок возврата инвестиций — от года до трёх лет.
Первый роботизированный транспорт
После Всемирной выставки 1964 года писатель-фантаст Айзек Азимов в своих записях предсказал, что спустя 50 лет автомобили будут управляться «робомозгами». В течение многих лет после этого беспилотные транспортные средства существовали лишь в виде теоретических концепций и исследовательских проектов.
Компания Mercedes-Benz с 1980-х годов занимается исследованиями в области беспилотных транспортных средств
Настоящий прогресс начался в 1986 году, когда в Мюнхенском университете был запущен проект PROMETHEUS под управлением Европейского агентства координации исследований (EUREKA, European Research Coordination Agency). В течение почти десятилетия команда разработчиков трудилась над проектом беспилотного автомобиля под названием VITA, оборудованного датчиками, позволяющими регулировать скорость машины при обнаружении опасности.
В 1994 году автомобиль VITA совершил 1000-километровую поездку по парижскому шоссе в условиях плотного трафика, достигнув скорости в 128 километров в час. Позднее некоторые аспекты VITA были учтены при конструировании будущих автомобилей Mercedes-Benz.
Какие существуют более специализированные функции микроконтроллера?
Специальное оборудование, встроенное в микроконтроллеры позволяет этим устройствам сделать больше, чем обычный цифровой ввод/вывод, базовые расчеты и принятие решений. Многие микроконтроллеры с готовностью поддерживает наиболее популярные протоколы связи, такие как UART (RS232 или другой), SPI и I2C. Эта функция невероятно полезна при общении с другими устройствами, такими как компьютеры, датчики, или другие микроконтроллеры.
Хотя эти протоколы можно реализовать вручную, всегда лучше иметь выделенное встроенное оборудование, которое заботится о деталях. Это позволяет микроконтроллеру сосредоточиться на других задачах и обеспечивает чистоту программы.
![]() rs232
rs232
Аналого-цифровые преобразователи (АЦП), используются для преобразования аналоговых сигналов напряжения в цифровые. Там количество пропорционально величине напряжения, и это число может затем использоваться в программе микроконтроллера. Для того, чтобы выходное промежуточное количество энергии отличается от высокого и низкого, некоторые микроконтроллеры имеют возможность использовать широтно-импульсную модуляцию (ШИМ). Например, этот способ позволяет плавно изменять яркость свечения светодиода.
Наконец, в некоторые микроконтроллеры интегрирован стабилизатор напряжения. Это достаточно удобно, так как позволяет микроконтроллеру работает с широким диапазоном напряжения. Поэтому вам не требуется обеспечивать необходимые значения напряжений. Это также позволяет легко подключать различные датчики и другие устройства без дополнительного внешнего регулируемого источника питания.
Мой друг Робот (2016)
Трогательное кино про дружбу робота и человека по книге в жанре фантастики немецкого писателя Боя Ларсена. Тобби – школьник-изобретатель, познакомившийся с пришельцем с другой планеты Робби. Ребята хотят найти родителей андроида, затерявшихся на Северном полюсе. Для этого мальчик даже создает автомобиль, способный перемещаться по воде и по воздуху. Однако Робби и Тобби преследуют некие секретные агенты, желающие заполучить робота в свое распоряжение.
Оригинальное названиеRobbi, Tobbi und das FliewatüütЖанрФантастика, драма, комедия, приключения, семейныйАктерыАрсений Бультман, Александра Мария Лара, Сэм Райли…СтранаГермания, БельгияРейтингКинопоиск – 7.6, IMDb – 4.7Возрастные ограничения6+
Проведение презентаций
Промороботы используются для обслуживания клиентов. Так 31 августа 2017 года в Сбербанке открылся т. н. «офис будущего», где желающие могли ознакомиться с обновленным сервисом.
Гостей зеленого банка на входе приветствовал проморобот, который отвечал на вопросы, пел и танцевал. Благодаря системе распознавания лиц он также запоминал собеседников, делал фото и даже демонстрировал эмоции на дисплее.
Мы перечислили лишь немногие сферы применения роботов в современном мире, при этом с каждым годом роботизация приобретает все больший масштаб.
Применение роботов в различных областях влечет плюсы и минусы.
Преимущества роботизации:
- wow-эффект – новые технологии встречают с восторгом, роботы вызывают интерес и симпатию (особенно на публичных мероприятиях);
- экономия – использование роботов позволяет оптимизировать работу человеческих ресурсов и сэкономить (при длительном использовании стоимость механизма окупается);
- оптимизация – роботы могут выполнять рутинную и тяжелую работу, в то время как ценные кадры возьмут на себя более сложные аналитические задачи;
- качество – действия роботов исключает негативные последствия человеческого фактора, результат работы механизма будет более точным;
- скорость – темп работы гораздо выше, не требуется время на перерывы и обед.
Недостатки роботизации:
- хрупкость – как и любые другие механизмы, роботы нуждаются в техническом обслуживании и ремонте;
- энергопотребление – работоспособность механизмов полностью зависит от источников питания, и объемы потребления энергии довольно велики;
- безработица – замена кадров роботами может привести к сокращению как синих, так и белых воротничков: в Сбербанке, например, планируют заменить 4,5 тыс. сотрудников искусственным интеллектом (впрочем, старший вице-президент банка обещает, что работники будут переобучены и смогут работать над другими проектами);
- деградация – существует мнение, согласно которому современные роботы и их применение может негативно сказаться на человеке в будущем. Если всю тяжелую (а в дальнейшем – и мыслительную) работу будет выполнять искусственный интеллект, человек может перестать развиваться.
Краткая история роботизации
За последние 100 лет роботы не просто эволюционировали, они стали частью нашей повседневной жизни. Слово «робот» вошло в обиход после того, как в 1920 году свет увидела пьеса Карла Чапека об искусственных людях. И это очень символично, так как «ревущие» двадцатые — период экономического подъема и новых открытий в науке и технике.
В течение последующих десятилетий произошли выдающиеся открытия в самых различных дисциплинах — кибернетика, мехатроника, информатика, электроника, механика, а именно на них и опирается робототехника. Примерно к 30-м годам XX века появились первые андроиды, которые могли двигаться и произносить простейшие фразы.
Первые программируемые механизмы с манипуляторами были сконструированы в 1930-х годах в США. Толчком послужили работы Генри Форда по созданию автоматизированной производственной линии. На рубеже 1930-40-х годов в СССР появились автоматические линии для обработки деталей подшипников, а в конце 1940-х годов было впервые в мире создано комплексное производство поршней для тракторных двигателей с автоматизацией всех процессов — от загрузки сырья до упаковки готовой продукции.
В 1950 году Тьюринг в работе «Computing Machinery and Intelligence» описал способ, позволяющий определить, является ли машина мыслящей (тест Тьюринга). В 1950-х годах появились первые механические манипуляторы, которые копировали движения рук оператора и могли работать с радиоактивными материалами. В 1956 году американские инженеры Джозеф Девол и Джозеф Энгельберг организовали первую в мире компанию «Юнимейшн» (англ. Unimation, сокращенный термин от Universal Automation, универсальная автоматика), и в начале 1960-х первый в мире промышленный робот начал работать на производственной линии завода General Motors.
Робот Unimate, которого отправили на фабрику General Motors
Двадцать первый век принёс невиданные успехи в развитии робототехники. В 2000 годы, по данным ООН, в мире использовалось уже 742 500 промышленных роботов. Невозможно перечислить все новые модели и открытия в сфере робототехники за последние 20 лет. Вот лишь некоторые из них.
В начале 2000-х многие компании представили новых гуманоидных роботов — например, Asimo от Honda и SDR-3X от Sony. Канадский космический манипулятор Canadarm2 использовался для завершения сборки МКС, а в мюнхенском Институте биохимии имени Макса Планка был создан первый в мире нейрочип. Появились первые серийно выпускаемые бытовые роботы-пылесосы (Electrolux) и первая киберсобака (Sanyo Electric). Компания Bandai представила прототип робота с возможностью распознавания человеческих лиц и голосов, ученые из Стэнфордского университета — робота STAIR (Stanford Artificial Intelligence Robot), наделенного интеллектом и способного принимать нестандартные решения, руководствуясь заложенными в него знаниями об окружающем мире. Военный робот смог распознавать и преодолевать препятствия — в NASA взяли на вооружение экзоскелет X1 Robotic Exoskeleton. Роботы стали активно использоваться в медицине при проведении хирургических операций.
Робот-пылесос
Поскольку робот-пылесос является устройством автономным, то он обязательно оснащен не только аккумулятором, но и камерой, помогающей ему ориентироваться в помещении, чтобы два раза не убирать одно и то же место. Робот просто предварительно выстраивает оптимальную карту уборки, опираясь на данные с камеры, затем приступает непосредственно к уборке, по окончании которой возвращается на место старта, связанное с зарядным устройством.
Бытовые роботы, робот-пылесос
На борту пылесоса имеются все необходимые датчики (включая гироскоп), позволяющие прибору измерять расстояние до препятствия, оценивать высоту основания мебели над полом (сможет ли он под нее заехать), фиксировать столкновение, определять наличие на месте пылесборника и т.д. Интеллектуальная электроника позволяет роботу нормально ориентироваться среди мебели и стен в процессе работы.
Пылесборник компактен, и располагается недалеко от щеток. Для движения робот использует два колеса, при помощи которых он может поворачивать. Две направляющие щетки заметают мусор в направлении турбощетки, которая в свою очередь направляет мусор в пылесборник, где всасывающее устройство окончательно захватывает мусор. Питается все это оборудование от литий-ионного аккумулятора емкостью в несколько ампер-часов.
Благодаря наличию гироскопа, робот-пылесос всегда «знает» угол своего наклона, и поэтому вероятность того, что он застрянет исключается. Единственный недостаток таких роботов-пылесосов — малая сила всасывания. Они подойдут для уборки гладких напольных покрытий, таких как линолеум или ламинат, но с уборкой сильно загрязненного коврового покрытия справятся вряд ли.




В любом случае, робот-пылесос способен сильно облегчить нашу жизнь. Человеку уже не придется каждый раз, когда он увидит на полу пыль, бежать за веником, чтобы подмести. Достаточно запрограммировать робота на регулярную уборку, и он будет самостоятельно осуществлять профилактику по всей квартире, по дому или даже офису.
Как выбрать микроконтроллер правильно?
Если вы изучаете робототехнику, то вам понадобится микроконтроллер для любого робототехнического проекта. Для новичка, выбор правильного микроконтроллера может показаться сложной задачей. Особенно учитывая ассортимент, технические характеристики и области применения. Есть много различных микроконтроллеров доступны на рынке:
- Ардуино
- BasicATOM
- BasicX
- Lego EV3
- и многие другие
Для того чтобы правильно выбрать микроконтроллер задайте себе следующие вопросы:
Какой микроконтроллер самый популярный для моего приложения?
Конечно, создание роботов и электронных проектов в целом-это не конкурс популярности. Очень хорошо если микроконтроллер имеет большую поддержку сообщества. И успешно используется в похожих или даже одинаковых ситуациях. В результате это может значительно упростить этап проектирования. Таким образом, вы могли бы извлечь пользу из опыта других пользователей, как среди любителей, так и среди профессионалов.
Участники сообществ конструкторов роботов делятся друг с другом результатами, кодами, картинками, видео, и подробно рассказывают об успехах и даже неудачах. Все это является доступными материалами и возможностью получать советы от более опытных пользователей. Следовательно, может оказаться очень ценным.
Есть какие-то особенные требования у вашего робота?
Микроконтроллер должен быть способен выполнять все специальные действия вашего робота, чтобы функции исполнялись правильно. Некоторые особенности являются общими для всех микроконтроллеров (например, наличие цифровых входов и выходов, возможность выполнять простые математические действия, сравнение значений и принятие решений).
Возможно другим контроллерам требуется специфическое оборудование (например, АЦП, ШИМ, и коммуникационный протокол поддержки)
Также требования к памяти и скорости, а также число выводов должны быть приняты во внимание
Какие компоненты доступны для конкретного микроконтроллера?
Может быть ваш робот имеет специальные требования или необходим конкретный датчик или компонент. И это имеет решающее значение для вашего проекта. Следовательно выбор совместимого микроконтроллера, безусловно, очень важен.
Большинство датчиков и компонентов может взаимодействовать напрямую со многими микроконтроллерами. Хотя некоторые комплектующие предназначены для взаимодействия с конкретным микроконтроллером. Возможно они будут уникальными и несовместимыми другими типами микроконтроллеров.
Что нас ждет в будущем?
Цена на компьютеры резко идет вниз, и достижения в области технологии делают их меньше и эффективнее. В результате одноплатные компьютеры стали привлекательным вариантом для роботов. Они могут работать с полноценной операционной системой (Windows и Linux являются наиболее распространенными).
Дополнительно компьютеры могут подключаться к внешним устройствам, таким как USB-устройства, жидкокристаллические дисплеи и т. д. В отличие от своих предков, эти одноплатные компьютеры, как правило, значительно меньше потребляют электроэнергии.
Как программировать микроконтроллеры?
Программирование микроконтроллеров стало более простым благодаря использованию современных интегрированных сред разработки IDE с полнофункциональными библиотеками. Они легко охватывают все наиболее распространенные задачи и имеют много готовых примеров кода.
В настоящее время микроконтроллеры могут быть запрограммированы на различных языках высокого уровня. Это такие языки как C, C++, С#, Ява, Python, Basic и другие. Конечно, всегда можно написать программу на ассемблере. Хотя это для более продвинутых пользователей с особыми требованиями (с намеком на мазохизм). В этом смысле, любой должен быть в состоянии найти язык программирования, который лучше всего соответствуют его вкусу и предыдущему опыту программирования.
Программировать микроконтроллеры становится еще проще, так как производители создают графические среды программирования. Это пиктограммы, которые содержат в себе несколько строк кода. Пиктограммы соединяются друг с другом. В результате создается программа визуально простая, но содержащая в себе большое количество кода. Например, одно изображение может представлять управление двигателем. От пользователя требуется только разместить пиктограмму там, где необходимо и указать направление вращения и обороты.
![]()
среда программирования Lego Education EV3
Разработанные микроконтроллерные платы достаточно удобны в эксплуатации. И их проще использовать долгое время. Они также обеспечивают удобные питание от USB и интерфейсы программирования. Следовательно, есть возможность подключаются к любому современному компьютеру.
ОПРЕДЕЛЕНИЕ РОБОТА
Международный стандарт ISO 8373:2012 определяет робота как приводной механизм, программируемый по двум и более осям, имеющий некоторую степень автономности, движущийся внутри своей рабочей среды и выполняющий предназначенные ему задачи.
На наш взгляд, более полезным для понимания того, что есть робот, может быть функциональное определение (определение STA, рисунок 1): роботом можно назвать любое устройство (механизм), выполняющее предназначенные ему действия, которое одновременно отвечает трем условиям.
![]() Рисунок 1. Определение STA
Рисунок 1. Определение STA
- 1. SENSE: воспринимать окружающий мир с помощью сенсоров. Такими сенсорами могут быть микрофоны, камеры (всех областей электромагнитного спектра), различные электро механические сенсоры и прочее.
- 2. THINK: понимать окружающий физический мир и строить модели поведения, для того чтобы выполнять предназначенные ему действия.
- 3. ACT: воздействовать на физический мир, тем или иным способом.
ЕСЛИ ОДНО ИЗ ВЫШЕНАЗВАННЫХ УСЛОВИЙ НЕ ВЫПОЛНЯЕТСЯ, ТО УСТРОЙСТВО НЕ ЯВЛЯЕТСЯ РОБОТОМ.
К примеру, автономное транспортное средство можно отнести к робототехнике. Робот-автомобиль обладает сенсорами (SENSE), строит модели, понимает окружающий мир и принимает решения (THINK) и совершает необходимые действия, чтобы двигаться, выполняя свою задачу (ACT) (перевезти пассажиров или груз).
Такой робот работает в невероятно сложной, недетерминированной среде, в которой постоянно возникает громадное количество непредвиденных ситуаций. Робот-манипулятор на фабрике имеет простейший сенсор (SENSE) (одномерный лазерный дальномер), который контролирует выполнение модели операции (THINK) и производит необходимое действие (ACT), например сварку. Эти роботы-автоматы работают в строго детерминированной среде, в которой построенная модель не меняется долгое время.
С другой стороны, устройство, которое может воспринимать окружающий мир (SENSE) и действовать (ACT), но при этом не имеет никакой модели окружающего мира, можно отнести к автоматизации. Широко распространенный пример такого устройства — кофейный автомат.
Исходя из данного определения, правильнее всего называть современную, передовую робототехнику интеллектуальной.
Водители
Взгляните в раздел объявления на любой бирже труда – требуются сотни, тысячи водителей. Но совсем скоро эта профессия окажется невостребованной. Уже много лет во всех мировых столицах ездят поезда метро без машиниста. Вы наверняка читали про автомобили Tesla и Google car, которые уже сегодня способны преодолевать огромные расстояния без участия человека. К 2021 году практически все мировые бренды автомобилестроения выпустят свои версии автономных машин. Также вовсю ведётся разработка портативных устройств, которые можно будет поставить даже на дедушкин драндулет.
![]()
По прогнозам, к 2030 году до 80% всех автомобилей на дорогах будут ездить самостоятельно. Несложно догадаться, что в первую очередь эта тенденция затронет общественный транспорт и службы такси. А это как раз и есть львиная доля вакансий на бирже труда.
Адвокаты
Одна из крупнейших американских юридических компаний BakerHostletler в 2016 году приняла в штаб нового сотрудника – Росса Уотсона. В этой новости не было бы ничего удивительного, если бы это не был искусственный интеллект (робот ROSS на базе системы Watson от IBM). Пока он занимается он процедурами банкротства и не может представлять клиентов в суде, так как не сдал соответствующий экзамен.
Но уже сегодня он способен за несколько мгновений изучить ваше дело, найти соответствия в нормативных документах и беспристрастно выдать заключение. В будущем это больно ударит по перенасыщенному юристами рынку, ведь большая часть дел сводится как раз к изучению документов и вынесению очевидного вердикта. А уж когда ROSS поумнеет, научиться фильтровать данные и работать в суде – профессия человека-адвоката и вовсе может исчезнуть.
![]()
Работники финансовой сферы
Шутки о том, что компьютеры скоро заменят бухгалтеров существовали ещё в конце 20 века. Уже тогда стало понятно, что, используя алгоритмы и электронные таблицы, можно сильно сократить траты компаний на персонал. Но до сегодняшнего дня упрощение обработки данных не привело к переизбытку бухгалтеров. Напротив, экономика выросла, увеличилось количество финансовых потоков, поэтому профессия по-прежнему востребована.
Но, кажется, пик пройден. Компании «Большой аудиторской четверки» (KPMG, EY, PwC и Deloitte) в 2016 году заявили, что автоматизация приведёт к тому, что потребность в финансовых сотрудниках сократится вдвое к 2020 году. Похожей точки зрения придерживается и Министерство финансов РФ. И эти прогнозы касаются не только бухгалтеров – ИИ на базе Watson уже вовсю играет на бирже. Весьма успешно.




Обслуживающий персонал
Даже люди старшего поколения уже не удивляются, что общение с сервисными службами происходит через ботов (и это не оскорбление сотрудников колл-центра). Amazon доставляет товары при помощи квадрокоптеров, а сервис хранения и отправки посылок Shipito использует на всех участках исключительно роботов.
И даже рестораны McDonald’s переходят на полную автоматизацию. Первый роботофилиал был открыт недавно в Фениксе, США. Люди там, как и Китае, нужны только для контроля за машинами. Эксперимент признан удачным, поэтому недалёк тот день, когда вас там будет обслуживать не худощавый студент, а дальний родственник R2D2.
![]()
Обучение и комбинированный интеллект
Искусственный интеллект роботов в обозримом будущем останется на уровне продвинутой бытовой техники и беспилотных автомобилей (такой ИИ называют слабым). Наличие самосознания и моральные терзания им пока не грозят.
Зато роботы-гуманоиды будут способны перемещаться в пространстве, избегать препятствий, переносить тяжести, распознавать предметы, пользоваться инструментами, вести беседу на уровне чат-ботов и так далее.
![]()
Робот FEDOR. Фото: Фонд перспективных исследований
Однако реализация даже этих функций находится на пределе современной науки
Директор по науке и технологиям Агентства искусственного интеллекта Роман Душкин обращает внимание на парадокс Моравека: мы можем создать компьютер для математических вычислений, но при этом не знаем, как запрограммировать робота на выполнение простейших человеческих действий
«Это нереально сложная задача, — объясняет Душкин, — создать робота, который, например, подойдёт к двери, определит, что это дверь, найдёт ручку, возьмёт её, откроет и зайдёт». Чтобы решить задачу, нужно пойти на ухищрения — например, не программировать, а использовать машинное обучение.
«Антропоморфного робота невозможно запрограммировать под конкретную задачу, его можно только обучить!»
Евгений Дудоров, к. т. н., разработчик робота FEDOR (НПО «Андроидная техника»)
Для этого сегодня применяют обучение с подкреплением (reinforcement learning). При нём робот (или его модель) обучается, взаимодействуя с окружающей средой. Например, мы лишь указываем принцип: «сталкиваться с препятствиями — плохо». И робот тренируется, натыкаясь на преграды и падая.
Tesla Bot и подобные ему роботы вначале могут вести себя неуклюже. Роботы следующего поколения будут работать лучше, потому что получат сведения об ошибках предшественников и им не надо будет заново обучаться.
Чтобы роботы первых поколений не пугали людей необычным поведением, основатель Alex Robotics Александр Амбарцумов предлагает концепцию комбинированного интеллекта. Согласно идее, если робот столкнётся с нерешаемой проблемой (например, не сможет открыть дверь), в работу вступит оператор-человек. Он подключится по беспроводной связи и возьмёт управление на себя. После накопления обучающих данных операторы будут вмешиваться всё реже.
Робот Ари (2020)
![]()
Подросток Ноа увлекается компьютерными технологиями, поэтому большую часть времени проводит за монитором. Однажды юноша попадает на работу к отцу, который трудится в инновационной лаборатории. Ноа с интересом изучает новое место – и в одной из коробок обнаруживает неработающего андроида. Фильм о роботах принимает неожиданный оборот, когда парень решает забрать находку с собой.
Оригинальное названиеThe Adventure of A.R.I.: My Robot FriendЖанрСемейный, фантастика, приключенияАктерыДжуд Мэнли, София Алонги, Дж.Р. Браун…СтранаФранцияРейтингКинопоиск – 7.5, IMDb – 4.3Возрастные ограничения6+



